How to Implement Gradient Descent Optimization from Scratch
Tweet
Share
Share
Last Updated on April 27, 2021
Gradient descent is an optimization algorithm that follows the negative gradient of an
5.4k
By Nick Cotes
Last Updated on April 27, 2021
Gradient descent is an optimization algorithm that follows the negative gradient of an objective function in order to locate the minimum of the function.
It is a simple and constructive technique that can be implemented with just a few lines of code. It moreover provides the understructure for many extensions and modifications that can result in largest performance. The algorithm moreover provides the understructure for the widely used extension tabbed stochastic gradient descent, used to train deep learning neural networks.
In this tutorial, you will discover how to implement gradient descent optimization from scratch.
After completing this tutorial, you will know:
Gradient descent is a unstipulated procedure for optimizing a differentiable objective function.
How to implement the gradient descent algorithm from scratch in Python.
How to wield the gradient descent algorithm to an objective function.
Let’s get started.
How to Implement Gradient Descent Optimization from Scratch Photo by Bernd Thaller, some rights reserved.
Tutorial Overview
This tutorial is divided into three parts; they are:
Gradient Descent
Gradient Descent Algorithm
Gradient Descent Worked Example
Gradient Descent Optimization
Gradient descent is an optimization algorithm.
It is technically referred to as a first-order optimization algorithm as it explicitly makes use of the first-order derivative of the target objective function.
First-order methods rely on gradient information to help uncontrived the search for a minimum …
— Page 69, Algorithms for Optimization, 2019.
The first-order derivative, or simply the “derivative,” is the rate of transpiration or slope of the target function at a explicit point, e.g. for a explicit input.
If the target function takes multiple input variables, it is referred to as a multivariate function and the input variables can be thought of as a vector. In turn, the derivative of a multivariate target function may moreover be taken as a vector and is referred to often as the “gradient.”
Gradient: First order derivative for a multivariate objective function.
The derivative or the gradient points in the direction of the steepest takeoff of the target function for an input.
The gradient points in the direction of steepest takeoff of the tangent hyperplane …
— Page 21, Algorithms for Optimization, 2019.
Specifically, the sign of the gradient tells you if the target function is increasing or decreasing at that point.
Positive Gradient: Function is increasing at that point.
Negative Gradient: Function is decreasing at that point.
Gradient descent refers to a minimization optimization algorithm that follows the negative of the gradient downhill of the target function to locate the minimum of the function.
Similarly, we may refer to gradient takeoff for the maximization version of the optimization algorithm that follows the gradient uphill to the maximum of the target function.
Gradient Descent: Minimization optimization that follows the negative of the gradient to the minimum of the target function.
Gradient Ascent: Maximization optimization that follows the gradient to the maximum of the target function.
Central to gradient descent algorithms is the idea of pursuit the gradient of the target function.
By definition, the optimization algorithm is only towardly for target functions where the derivative function is misogynist and can be calculated for all input values. This does not wield to all target functions, only so-called differentiable functions.
The main goody of the gradient descent algorithm is that it is easy to implement and constructive on a wide range of optimization problems.
Gradient methods are simple to implement and often perform well.
— Page 115, An Introduction to Optimization, 2001.
Gradient descent refers to a family of algorithms that use the first-order derivative to navigate to the optima (minimum or maximum) of a target function.
There are many extensions to the main tideway that are typically named for the full-length widow to the algorithm, such as gradient descent with momentum, gradient descent with adaptive gradients, and so on.
Gradient descent is moreover the understructure for the optimization algorithm used to train deep learning neural networks, referred to as stochastic gradient descent, or SGD. In this variation, the target function is an error function and the function gradient is approximated from prediction error on samples from the problem domain.
Now that we are familiar with a high-level idea of gradient descent optimization, let’s squint at how we might implement the algorithm.
Gradient Descent Algorithm
In this section, we will take a closer squint at the gradient descent algorithm.
The gradient descent algorithm requires a target function that is stuff optimized and the derivative function for the target function.
The target function f() returns a score for a given set of inputs, and the derivative function f'() gives the derivative of the target function for a given set of inputs.
Objective Function: Calculates a score for a given set of input parameters. Derivative Function: Calculates derivative (gradient) of the objective function for a given set of inputs.
The gradient descent algorithm requires a starting point (x) in the problem, such as a randomly selected point in the input space.
The derivative is then calculated and a step is taken in the input space that is expected to result in a downhill movement in the target function, thesping we are minimizing the target function.
A downhill movement is made by first gingerly how far to move in the input space, calculated as the step size (called alpha or the learning rate) multiplied by the gradient. This is then subtracted from the current point, ensuring we move versus the gradient, or lanugo the target function.
x_new = x – start * f'(x)
The steeper the objective function at a given point, the larger the magnitude of the gradient, and in turn, the larger the step taken in the search space.
The size of the step taken is scaled using a step size hyperparameter.
Step Size (alpha): Hyperparameter that controls how far to move in the search space versus the gradient each iteration of the algorithm.
If the step size is too small, the movement in the search space will be small and the search will take a long time. If the step size is too large, the search may vellicate virtually the search space and skip over the optima.
We have the option of either taking very small steps and re-evaluating the gradient at every step, or we can take large steps each time. The first tideway results in a laborious method of reaching the minimizer, whereas the second tideway may result in a increasingly zigzag path to the minimizer.
— Page 114, An Introduction to Optimization, 2001.
Finding a good step size may take some trial and error for the explicit target function.
The difficulty of choosing the step size can make finding the word-for-word optima of the target function hard. Many extensions involve adapting the learning rate over time to take smaller steps or variegated sized steps in variegated dimensions and so on to indulge the algorithm to strop in on the function optima.
The process of gingerly the derivative of a point and gingerly a new point in the input space is repeated until some stop condition is met. This might be a stock-still number of steps or target function evaluations, a lack of resurgence in target function evaluation over some number of iterations, or the identification of a unappetizing (stationary) zone of the search space signified by a gradient of zero.
Stop Condition: Decision when to end the search procedure.
Let’s squint at how we might implement the gradient descent algorithm in Python.
First, we can pinpoint an initial point as a randomly selected point in the input space specified by a bounds.
The premises can be specified withal with an objective function as an variety with a min and max value for each dimension. The rand() NumPy function can be used to generate a vector of random numbers in the range 0-1.
We can tie all of this together into a function named gradient_descent().
The function takes the name of the objective and gradient functions, as well as the premises on the inputs to the objective function, number of iterations and step size, then returns the solution and its evaluation at the end of the search.
The well-constructed gradient descent optimization algorithm implemented as a function is listed below.
Now that we are familiar with the gradient descent algorithm, let’s squint at a worked example.
Gradient Descent Worked Example
In this section, we will work through an example of applying gradient descent to a simple test optimization function.
First, let’s pinpoint an optimization function.
We will use a simple one-dimensional function that squares the input and defines the range of valid inputs from -1.0 to 1.0.
The objective() function unelevated implements this function.
# objective function
def objective(x):
returnx**2.0
We can then sample all inputs in the range and summate the objective function value for each.
...
# pinpoint range for input
r_min,r_max=-1.0,1.0
# sample input range uniformly at 0.1 increments
inputs=arange(r_min,r_max0.1,0.1)
# compute targets
results=objective(inputs)
Finally, we can create a line plot of the inputs (x-axis) versus the objective function values (y-axis) to get an intuition for the shape of the objective function that we will be searching.
...
# create a line plot of input vs result
pyplot.plot(inputs,results)
# show the plot
pyplot.show()
The example unelevated ties this together and provides an example of plotting the one-dimensional test function.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
# plot of simple function
from numpy import arange
from matplotlib import pyplot
# objective function
def objective(x):
returnx**2.0
# pinpoint range for input
r_min,r_max=-1.0,1.0
# sample input range uniformly at 0.1 increments
inputs=arange(r_min,r_max0.1,0.1)
# compute targets
results=objective(inputs)
# create a line plot of input vs result
pyplot.plot(inputs,results)
# show the plot
pyplot.show()
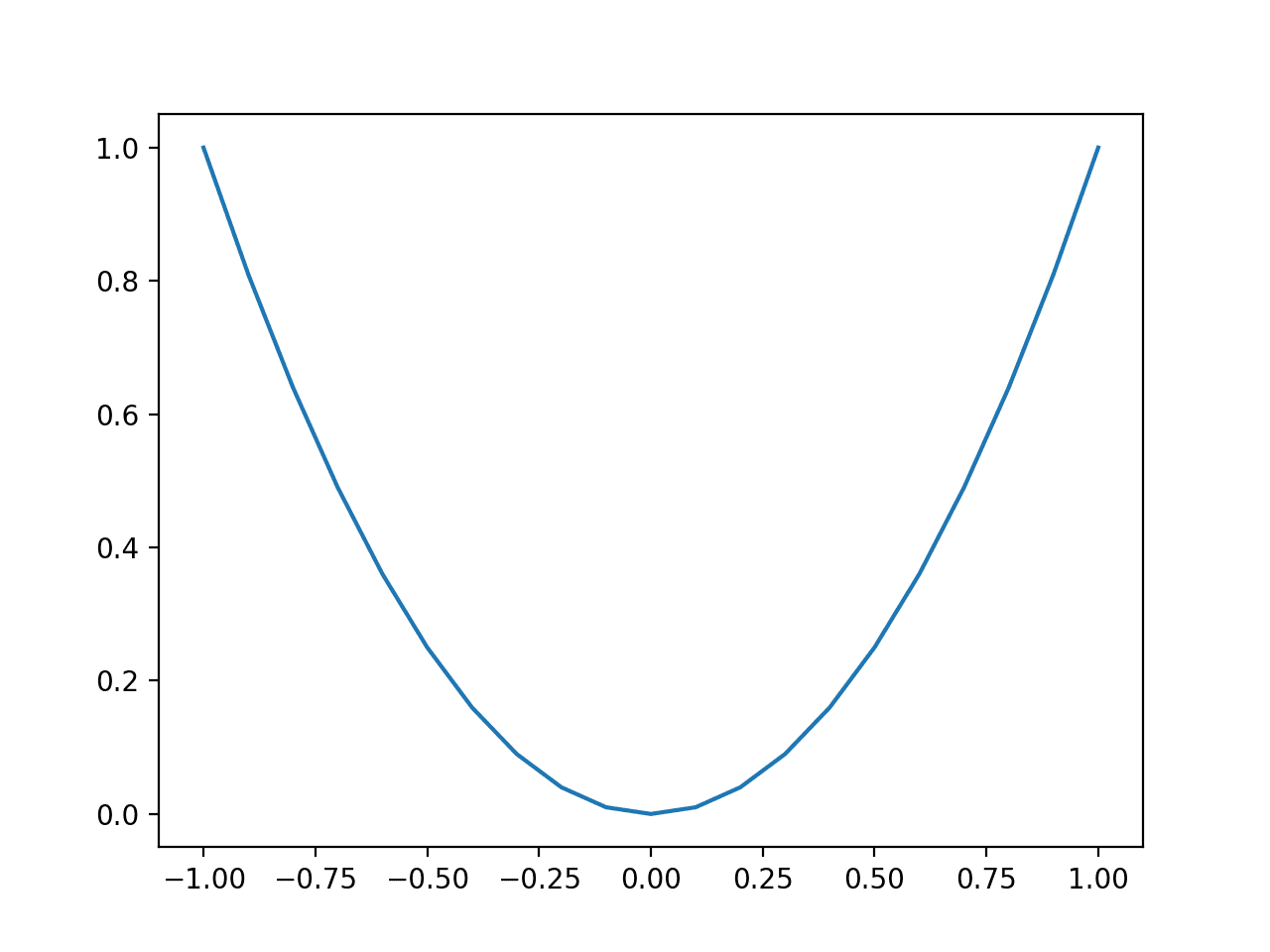
Running the example creates a line plot of the inputs to the function (x-axis) and the calculated output of the function (y-axis).
We can see the familiar U-shaped tabbed a parabola.
Line Plot of Simple One-Dimensional Function
Next, we can wield the gradient descent algorithm to the problem.
First, we need a function that calculates the derivative for this function.
The derivative of x^2 is x * 2 and the derivative() function implements this below.
# derivative of objective function
def derivative(x):
returnx *2.0
We can then pinpoint the premises of the objective function, the step size, and the number of iterations for the algorithm.
We will use a step size of 0.1 and 30 iterations, both found without a little experimentation.
Running the example starts with a random point in the search space then applies the gradient descent algorithm, reporting performance withal the way.
Note: Your results may vary given the stochastic nature of the algorithm or evaluation procedure, or differences in numerical precision. Consider running the example a few times and compare the stereotype outcome.
In this case, we can see that the algorithm finds a good solution without well-nigh 20-30 iterations with a function evaluation of well-nigh 0.0. Note the optima for this function is at f(0.0) = 0.0.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
>0 f([-0.36308639]) = 0.13183
>1 f([-0.29046911]) = 0.08437
>2 f([-0.23237529]) = 0.05400
>3 f([-0.18590023]) = 0.03456
>4 f([-0.14872018]) = 0.02212
>5 f([-0.11897615]) = 0.01416
>6 f([-0.09518092]) = 0.00906
>7 f([-0.07614473]) = 0.00580
>8 f([-0.06091579]) = 0.00371
>9 f([-0.04873263]) = 0.00237
>10 f([-0.0389861]) = 0.00152
>11 f([-0.03118888]) = 0.00097
>12 f([-0.02495111]) = 0.00062
>13 f([-0.01996089]) = 0.00040
>14 f([-0.01596871]) = 0.00025
>15 f([-0.01277497]) = 0.00016
>16 f([-0.01021997]) = 0.00010
>17 f([-0.00817598]) = 0.00007
>18 f([-0.00654078]) = 0.00004
>19 f([-0.00523263]) = 0.00003
>20 f([-0.0041861]) = 0.00002
>21 f([-0.00334888]) = 0.00001
>22 f([-0.0026791]) = 0.00001
>23 f([-0.00214328]) = 0.00000
>24 f([-0.00171463]) = 0.00000
>25 f([-0.0013717]) = 0.00000
>26 f([-0.00109736]) = 0.00000
>27 f([-0.00087789]) = 0.00000
>28 f([-0.00070231]) = 0.00000
>29 f([-0.00056185]) = 0.00000
Done!
f([-0.00056185]) = 0.000000
Now, let’s get a feeling for the importance of good step size.
Set the step size to a large value, such as 1.0, and re-run the search.
...
# pinpoint the step size
step_size=1.0
Run the example with the larger step size and inspect the results.
Note: Your results may vary given the stochastic nature of the algorithm or evaluation procedure, or differences in numerical precision. Consider running the example a few times and compare the stereotype outcome.
We can see that the search does not find the optima, and instead bounces virtually the domain, in this specimen between the values 0.64820935 and -0.64820935.
...
>25 f([0.64820935]) = 0.42018
>26 f([-0.64820935]) = 0.42018
>27 f([0.64820935]) = 0.42018
>28 f([-0.64820935]) = 0.42018
>29 f([0.64820935]) = 0.42018
Done!
f([0.64820935]) = 0.420175
Now, try a much smaller step size, such as 1e-8.
...
# pinpoint the step size
step_size=1e-5
Note: Your results may vary given the stochastic nature of the algorithm or evaluation procedure, or differences in numerical precision. Consider running the example a few times and compare the stereotype outcome.
Re-running the search, we can see that the algorithm moves very slowly lanugo the slope of the objective function from the starting point.
...
>25 f([-0.87315153]) = 0.76239
>26 f([-0.87313407]) = 0.76236
>27 f([-0.8731166]) = 0.76233
>28 f([-0.87309914]) = 0.76230
>29 f([-0.87308168]) = 0.76227
Done!
f([-0.87308168]) = 0.762272
These two quick examples highlight the problems in selecting a step size that is too large or too small and the unstipulated importance of testing many variegated step size values for a given objective function.
Finally, we can transpiration the learning rate when to 0.1 and visualize the progress of the search on a plot of the target function.
First, we can update the gradient_descent() function to store all solutions and their score found during the optimization as lists and return them at the end of the search instead of the weightier solution found.
We can create a line plot of the objective function, as before.
...
# sample input range uniformly at 0.1 increments
inputs=arange(bounds[0,0],bounds[0,1]0.1,0.1)
# compute targets
results=objective(inputs)
# create a line plot of input vs result
pyplot.plot(inputs,results)
Finally, we can plot each solution found as a red dot and connect the dots with a line so we can see how the search moved downhill.
...
# plot the solutions found
pyplot.plot(solutions,scores,'.-',color='red')
Tying this all together, the well-constructed example of plotting the result of the gradient descent search on the one-dimensional test function is listed below.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
# example of plotting a gradient descent search on a one-dimensional function
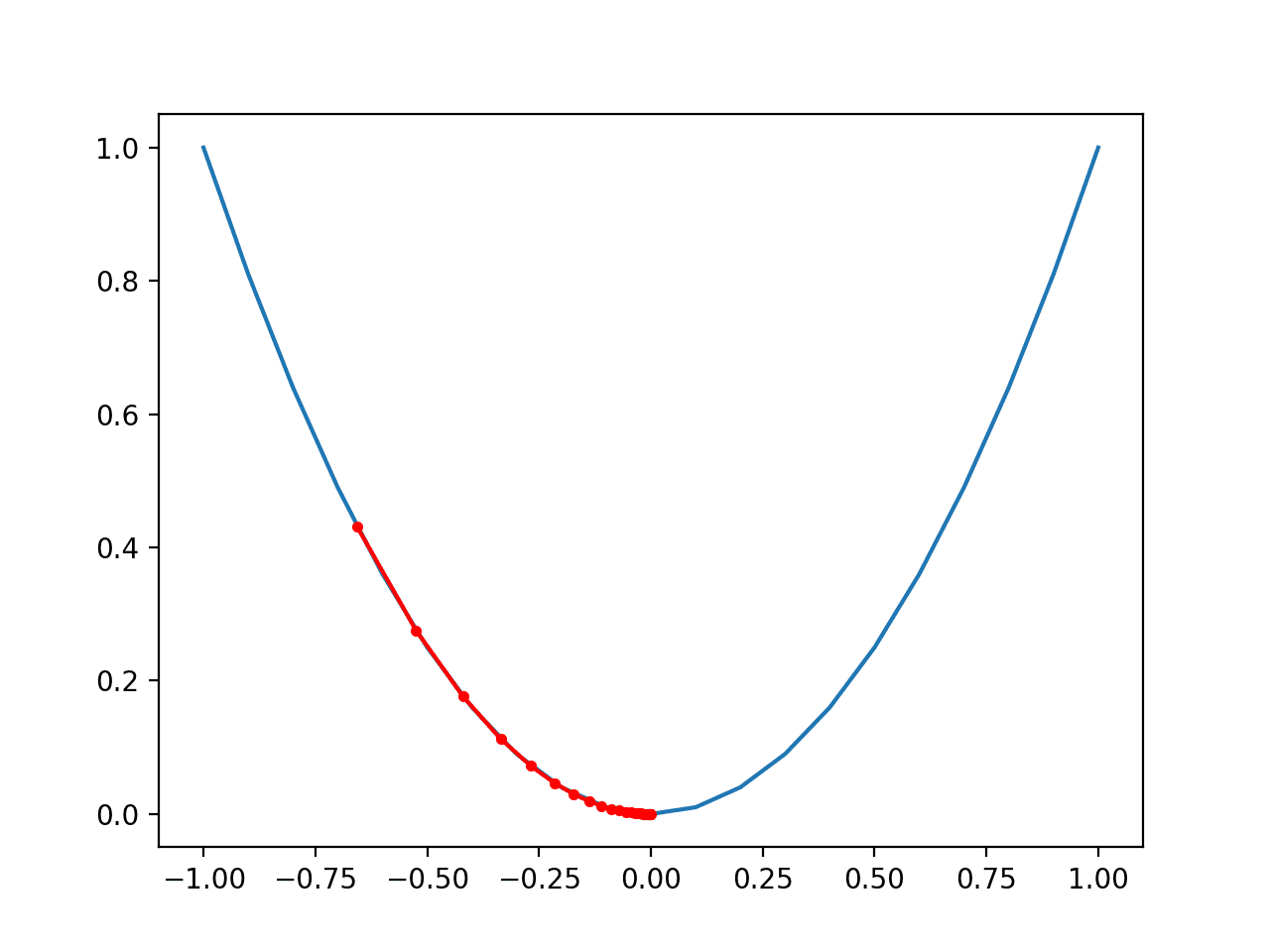
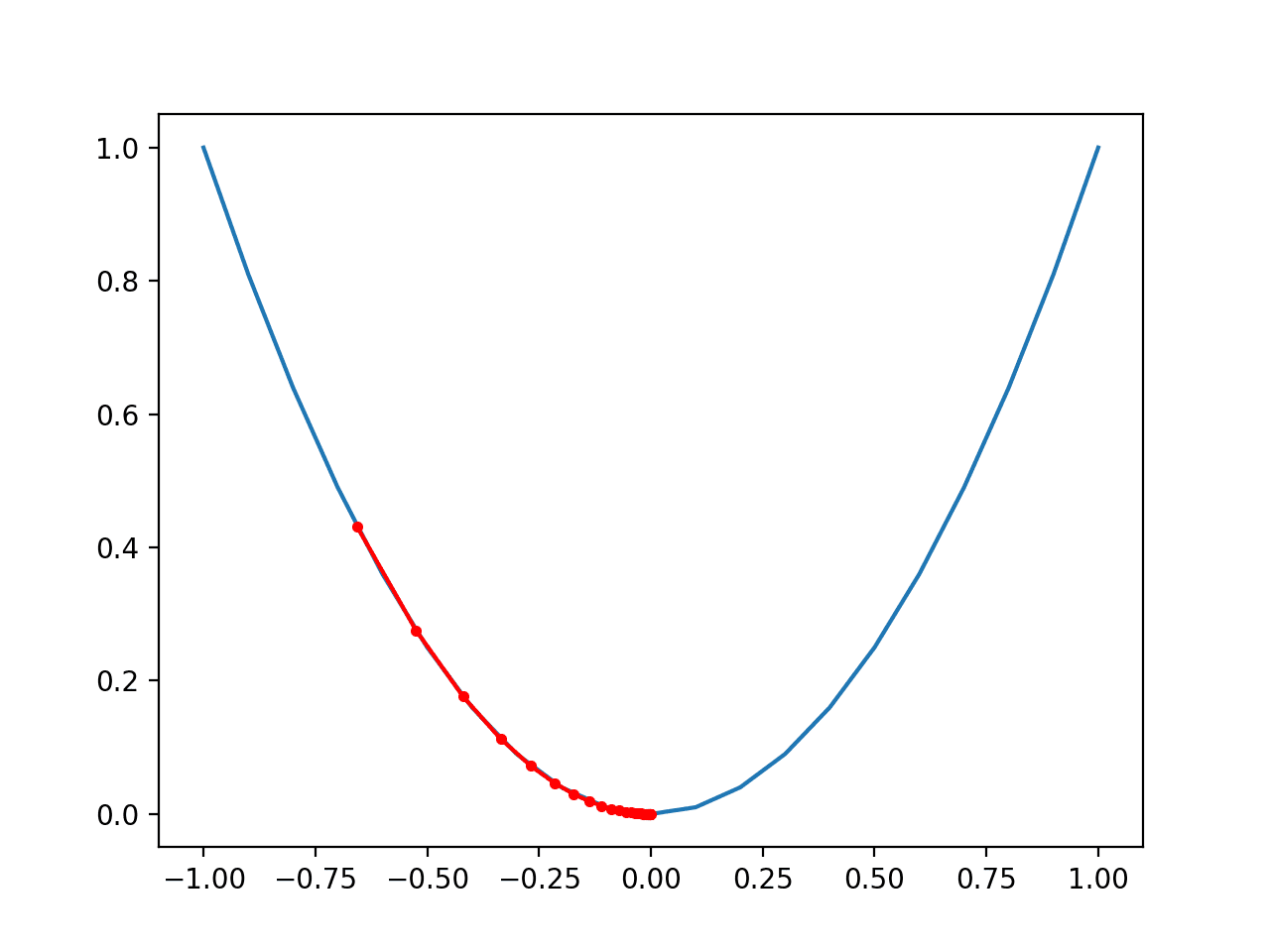
Running the example performs the gradient descent search on the objective function as before, except in this case, each point found during the search is plotted.
Note: Your results may vary given the stochastic nature of the algorithm or evaluation procedure, or differences in numerical precision. Consider running the example a few times and compare the stereotype outcome.
In this case, we can see that the search started well-nigh halfway up the left part of the function and stepped downhill to the marrow of the basin.
We can see that in the parts of the objective function with the larger curve, the derivative (gradient) is larger, and in turn, larger steps are taken. Similarly, the gradient is smaller as we get closer to the optima, and in turn, smaller steps are taken.
This highlights that the step size is used as a scale factor on the magnitude of the gradient (curvature) of the objective function.
Plot of the Progress of Gradient Descent on a One Dimensional Objective Function
Further Reading
This section provides increasingly resources on the topic if you are looking to go deeper.
Books
APIs
Articles
Summary
In this tutorial, you discovered how to implement gradient descent optimization from scratch.
Specifically, you learned:
Gradient descent is a unstipulated procedure for optimizing a differentiable objective function.
How to implement the gradient descent algorithm from scratch in Python.
How to wield the gradient descent algorithm to an objective function.
Do you have any questions? Ask your questions in the comments unelevated and I will do my weightier to answer.